Operaţii cu vectori. Viteza şi acceleraţia.
Tag-uri
Partajeaza in Google Classroom

Transcript
În ce dată doua lecție de mecanică
newtoniană vom vorbi despre operații
cu vectori și apoi despre viteză
și accelerația în lecția trecută
am introdus noțiunea de vectori
și proprietățile ei vom vorbi acum
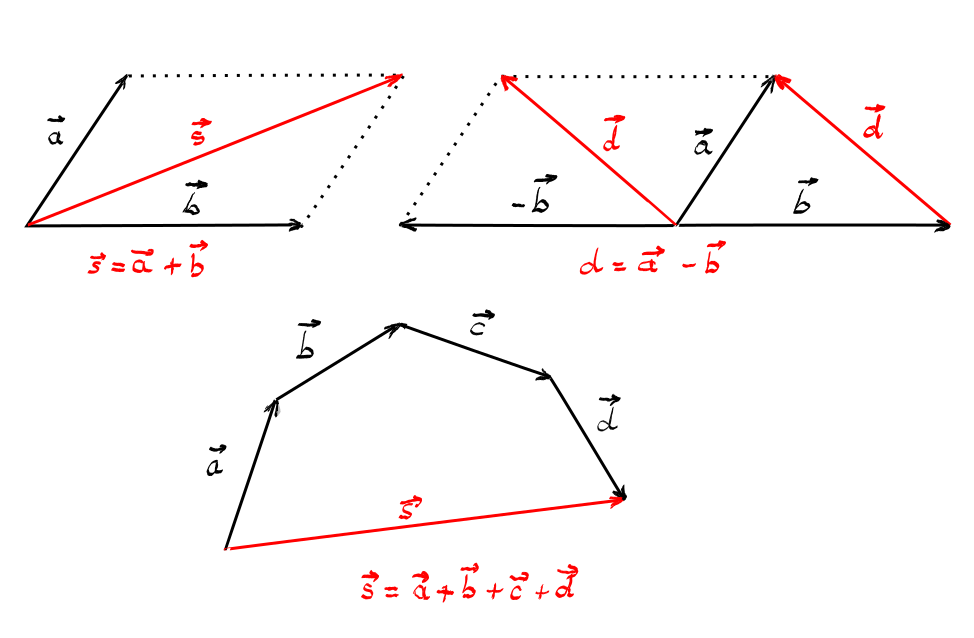
despre adunarea vectorilor și scăderea
lor să luăm doi vectori a și b
și să construim suma lor esti diferența
lor tei la început folosind metoda
paralelogramului primul pas este
propunerea celor doi vectori a
și b coadă la coadă adică pornind
din același punct și formăm paralelogramul
care are laturile egale cu a și
b atunci vectorul sumă S va fi
diagonala paralelogramului ce pleacă
din același punct ca și vectorii
originali pentru a forma vectorul
diferență observăm că diferența
a doi vectori a minus b în cazul
ăsta Acesta este de fapt același
lucru ca suma lor în sensul că
a minus b este egal cu a plus minus
Deci formăm vectorul minus pe care
este egal în magnitudine cu b are
aceeași direcție adică dreaptă
de suport dar sens contrar deci
a minus b va fi diagonala paralelogramului
cu o latură egală cu minus b observăm
că În paralelogramul originar vectorul
diferență de este diagonala mică
a paralelogramului există două
metode alternative foarte foarte
similare cu metoda paralelogramului
la pot fi folosite în loc și anume
pentru adunare putem folosi metoda
numită cap coadă în care cei doi
vectori de adunat a și b sunt puși
coadă la cap adică alegem latura
opusă pentru beci această latură
este tot vectorul b dar punem vectorul
b cu coada la capul vectorului
și atunci suma s Completează triunghiul
Deci metoda cap coadă presupune
punerea celor doi vectori cu coada
celui de al doilea la capul primului
lector deci a și b sunt acești
doi vectori și atunci vectorul
sumă va completa triunghiul format
de a și b pentru diferență putem
folosi metoda coadă coadă care
din nou se vede în metoda paralelogramului
deci punem vectorii de scăzut a
și b coadă la coadă Și atunci vectorul
diferență va completa triunghiul
Deci dacă luăm vectorul A punem
vectorul b cu coada la Coada vectorului
a b c avem a și b m și atunci vectorul
diferență de fac Completați unghiul
vârful vectorului de corespunde
cu vârful primului Factor din diferență
în cazul acesta vectorul a să dăm
un exemplu intuitiv al acestor
operații cu Vector Să considerăm
că doriți să ajungeți în Frankfurt
plecând din București o metodă
de a face acest lucru este de a
lua un zbor Lufthansa să notăm
această metodă de zbor cu unul
dar în același timp puteți ajunge
în Frankfurt London zbor Tarom
zboruri Tarom afaceri scol în Cluj
Deci veți ajunge în Frankfurt unui
rând de la București la Cluj notăm
acest Vector cu 2 și apoi din Cluj
la Frankfurt pe care îl notăm cu
3 se poate observa imediat că suma
vectorilor doi și 3 este egală
cu vectorul 1 aceasta deoarece
cei doi vectori sunt coadă la cap
iar vectorul 1 Completează triunghiul
interpretare intuitivă fiindcă
cei trei vectori dau o dau două
metode alternative de ajungi în
același punct plecând din același
punct Deci plecăm din București
și ajungem în Frankfurt prin două
pe două drumuri iar suma vectorilor
de pe drumul la doilea va da același
rezultat ca vectorul de pe primul
drum la fel foarte ușor se poate
vedea că vectorul 3 este egal cu
diferența dintre vectorul 1 și
vectorul 2 și interpretarea evidentă
fiindcă vectorul diferență ne arată
cu cât zboară cei din Cluj mai
puțin decât cei care zboară din
București care deși au două alternativele
ajunge în Frankfurt Voi mai mult
în operațiile cu vectori direcția
și sensul sunt la fel de importante
ca și magnitudinea pentru a arăta
acest lucru important pe care îl
vom întâlni de multe ori Să considerăm
doi vectori cu aceeași magnitudine
să zicem 5:00 o pereche de vectori
cu magnitudinea 5 și vom face diferite
operații cu ei în primul rând Să
considerăm acest Vector ca fiind
coliniari atunci suma celor doi
vectori va da deci cinci plus cinci
va da 10 în cazul în care ei sunt
luați cu același sens dar de ce
nu acest caz 5 plus 5 de zeci dar
putem să luăm vectorii ca având
sensuri opuse deci 5 plus 5 din
nou dar sensurile celor două vectori
celor doi vectori sunt contrare
în acest caz suma va da 0 deci
5 plus 5 în acest caz este egal
cu zero putem să luăm acești doi
vectori ca fiind ortogonali pentru
a face suma lor folosind metoda
cap coadă deci punem cel de al
doilea factor cu coada la capul
primului Vector Și luăm un unghi
de 90 de grade între ei aceasta
înseamnă că sunt ortogonali Deci
avem cei doi vectori și suma lor
este ipotenuza Deci vectorul sumă
este acesta și nu poate fi calculat
cu teorema Pitagora care spune
că ipotenuza la pătrat Pitagora
care spune că ipotenuza la pătrat
deces pătrat este egală cu suma
catetelor la pătrat Deci cinci
pătrat plus 5 pe la pătrat rezultă
că în acest caz suma celor doi
vectori 5 plus 5 va da 7 7 Sectorială
deci 5 plus 5 sumă vectorială poate
da 7 plus în 7 7 la fel putem vedea
pentru scădere în cazul vectorilor
coliniari că diferența de rezultate
foarte diferite în funcție de orientare
și sensul direcția și sensul celor
doi vectori de cinci minus cinci
vectori au același sens de mod
Evident 0 deci 5 minus 5 este egal
cu 0 dar la fel de bine dacă cei
doi vectori au orientări contrare
sensuri contrare aceeași direcție
dar sens contrar Deci cel de al
doilea factor are sens contrar
atunci obținem o diferență egală
cu 10 Deci 5-a minus 5 poate fi
egal cu 10 și pentru vectori ortogonali
punem cei doi vectori descăzut
coadă la coadă vrei amintesc scăderea
se face prin metoda coadă la coadă
un unghi de 90 de grade doi vectori
cu magnitudinea 5 și vectorul diferență
este ipotenuza și aplică metoda
Pitagora obținem la fel că 5 minus
5 pentru vectorul ortogonali de
7 7 vector Deci folosind doi vectori
cu aceeași magnitudine sau modul
și anume 5 putem obține pentru
adunarea și scăderea lor rezultate
foarte diferite în funcție de Direcția
și sensul celor doi vectori să
introducem viteza unui mobil aflat
pe o traiectorie rectilinie dea
lungul coordonatei x Deci ne aflam
pe axa de coordonate o x aleasă
de a lungul traiectoriei dacă acest
mobil trece prin punctul a aflat
în poziția X1 la momentul T1 și
prin punctul B aflată în poziția
X2 la momentul T2 putem defini
viteza medie a mobilului pe segmentul
ab al traiectoriei ca fiind Delta
x adică x 2 minus x 1 împărțit
la Delta t Adică te 2 minute 1
să observăm că dacă luăm mai multe
puncte de a lungul acestei traiectorie
notate aici cu c d și e de exemplu
viteza medie pe veri segmente ale
traiectoriei este în general diferită
pentru că de obicei îmi și care
este neuniformă adică mai înceată
sau mai rapidă pe Vali segmentele
ale tractor in Aceasta este o problemă
dacă dorim să definim viteza momentană
la moment dat A deci dacă considerăm
un moment dat te da lungul traiectorii
și vrem să definim viteza exact
în acest punct Nu putem deoarece
viteza medie este definită pentru
interval în jurul momentului te
interval în care în mod uzual viteza
variază nu avem o singură valoare
pentru acest vede la momentul te
Deci pentru a rezolva această problemă
trebuie să considerăm punctele
sau momentele T1 și T2 ce încadrează
momentul t m astfel încât Delta
t să fie foarte mică acest interval
temporar cetine de către 0 Pentru
că atunci nu mai avem de a face
cu ou variația vitezei în acest
interval valoarea vitezei E unică
Deci definită și putem introduce
viteza momentană la momentul t
definită ca și viteza medie dar
cu specificarea foarte importantă
că Delta te tin de către 0 pentru
a introduce viteza în cazul mai
general 3 Dimensional facem extensiei
simplă vectorul viteză medie pe
același sector a b Dar al unei
traiectorii tridimensionale în
acest caz va fi definit ca Delta
R pe Delta t adică r 2 minus seru
nu diferența dintre vectorii poziție
la cele două momente T2 și te 1
împărțit la diferența dintre doi
și te 1 bineînțeles această diferență
este o diferență vectorială la
fel se introduce și vectorul viteza
momentană ca fiind Delta R împărțit
la Delta t dar cu Delta t tinde
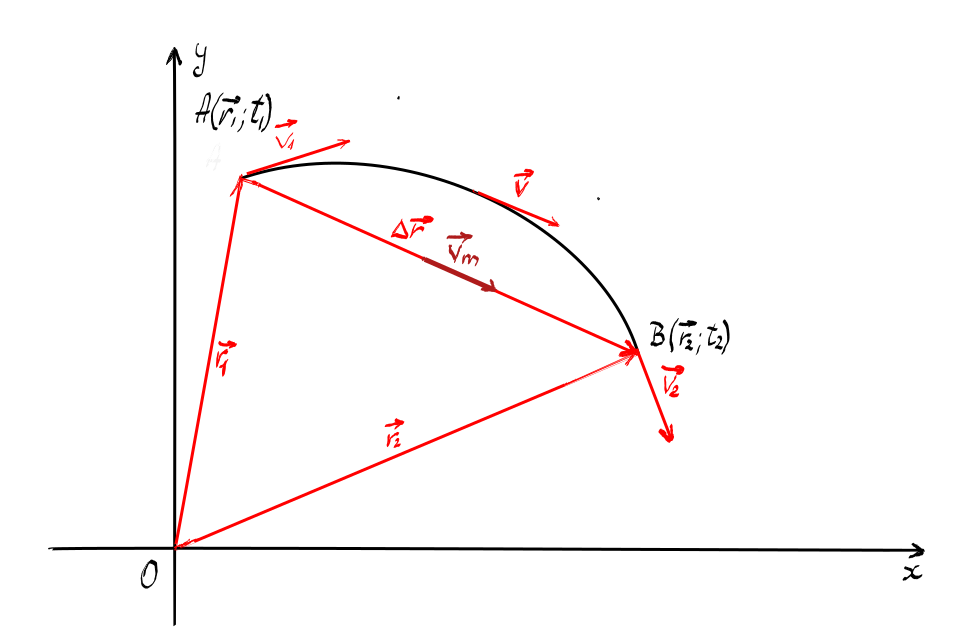
la 0 Să considerăm un alt caz cel
al traiectoriei curbilinii Deci
pentru traiectoria curbilinie în
particular în acest desen consideram
o traiectorie circulară vectorul
poziție ia va descrie verii poziții
pe acest cerc corespunzând verilor
momente d1 și d2 în acest caz dacă
Delta t tinde către 0 Delta t care
este prin definiție te 2 minus
de 1 minus t 1 tinde către 0 atunci
cele cei doi vectori aer 1 și r
2 Se apropie foarte mult pentru
că distanța dintre cele două poziții
scade și atunci vectorul aer din
mijlocul acestui segment de cerc
va fi perpendicular pe Delta aer
Da deci pentru Delta te tin de
către 0 1 și r 2 Se apropie foarte
mult unul de celălalt devenind
un Vector R care devine perpendicular
pe e dar viteza la momentul t este
definită ca Delta Air PDL tot A
deci în concluzie viteza momentană
la momentul t m este perpendiculară
pe vectorul poziție la acel moment
te În consecință dacă acesta este
vectorul aer la momentul t Viteza
va fi tangentă viteza la momentul
t va fi tangentă la cerc în în
raza descrisă de rdt magnitudinea
vitezei momentane vedete este definită
tot prin de el tire împărțită la
del tate mici magnitudinea vectorului
este magnitudinea aceste diferențe
pentru accelerație de formulele
directe fără a mai explicat foarte
mult pentru că ideea este aceeași
accelerația pe un segment AB de
dreaptă este viteza de variația
vitezei Deci Delta V împărțit la
Delta t pe acel segment a b accelerația
momentană se definește identica
Viteza momentană e viteza de variația
vitezei Deci Delta veni pe Delta
t dar cu un Delta t tinzând către
0 iar extensia încă pentru cazul
3 dimensionali Deci pentru Vector
este imediată a m Vita accelerația
medie vectorială pe segmentul a
b este definită ca Delta V Vector
împărțită la deltat A deci diferența
celor doi vectori viteză V1 minus
seria 2 împărțit la Delta t iar
accelerația momentană este definită
ca Delta V împărțită la Delta t
cu Delta t tinzând către 0
Operații cu vectori. Viteza și accelerația.Ascunde teorie X




 .
. .
.

 ,
,




Navigare în lectii
Cumpara abonament