Mişcarea circulară uniformă: mărimi caracteristice, acceleraţia centripetă.
Tag-uri
Partajeaza in Google Classroom

Transcript
începe patra lecții de mecanică
în italiană discutăm despre mișcarea
circulară uniforma mișcarea circulară
uniformă a unui mobil are loc atunci
când traiectoria sa este un cerc
și modulul vitezei momentane este
constant așa cum se arată în această
ecuație vorbim subliniezi doar
de modulul și nu de Direcția vitezei
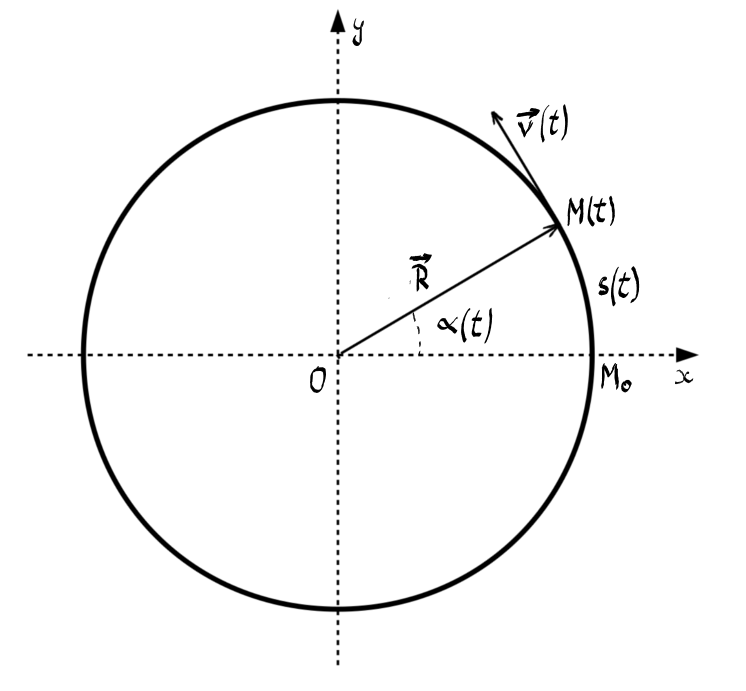
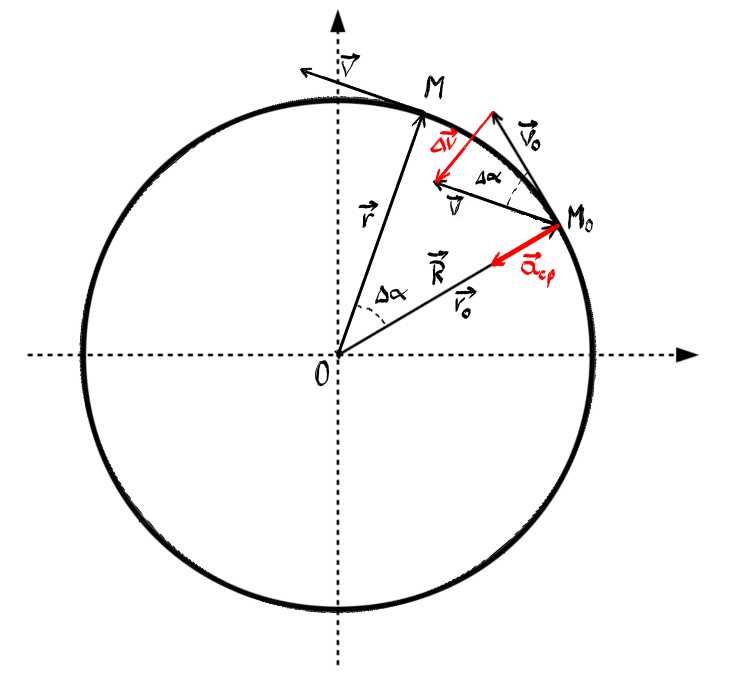
această schemă prezintă elementele
de bază ale unei mișcări circulare
mobilul se află în poziția m0 la
momentul t0 și apoi în poziția
m La un anumit moment te poziția
vectorul poziție este notat cu
r și vectorul viteză cuv reamintesc
că în lecția a doua am demonstrat
că pentru o mișcare circulară viteza
momentană este perpendiculară pe
vectorul poziție așa cum vedem
aici Vita viteza vesti tangențială
la traiectorie între o mișcare
circulară uniformă mobilul descrie
arce de cerc egale în intervale
de timp egale Asta bineînțeles
datorită vitezei sale constant
de asemeni putem observa că vectorul
poziție are un modul constant și
anume egal cu raza traiectoriei
în consecință ecuația de mișcare
va fi dată de orientarea modul
de orientarea vectorului poziție
Acest lucru se poate face în două
feluri și anume precizarea legii
descrise de orientarea vectorului
poziție rdt În primul rând putem
specifica ecuația pentru unghiul
acestui Vector de poziție notat
în schema noastră cu alfa de ten
Alfa se numește și a ști sau unghiulară
al doilea fel de a specifica orientarea
vectorului poziției este aceea
de a da ecuația abscisei curbilinii
s d t s deteste lungimea arcului
traiectoriei deschis de mobilul
m de ce avem două forme alternative
de specificare a ecuației de mișcare
mai exact a orientării vectorului
poziții putem da ecuația pentru
a ști sau unghiulară sau pentru
abscisa curbilinii ele sunt legate
prin relații simplă abscisa curbilinie
s de taste egală cu raza traiectoriei
care o constantă înmulțită cu abscisa
unghiulară Alfa de te este important
de ținut minte că aceasta este
ecuația este valabilă dacă unghiul
Alfa este măsurat în radiani și
nu în grade am radianul este o
unitate de măsură alternativa unghiurilor
față de grad Pentru a stabili relația
dintre cele două unități de măsură
a unghiurilor observăm că o rotație
completă corespunde unui unghi
de 360 de grade iar în radiani
aceasta corespunde unei circumferințe
complete Deci 2 înmulțit cu aer
aceasta este circumferință a unui
cerc cu rază r împărțită la aer
Deci din nou Alfa care corespunde
unui unei rotații complete de 360
de grade este egal cu s pentru
o rotație completă Deci 2 pi R
circumferința cercului împărțit
la R Da deci în radiani acest unghi
va fi doi i în radiani de aici
obținem ecuația care leagă gradele
de radiani Deci dacă avem un unghi
Alfa măsurat în radiani trebuie
să împărțim la doi pini pentru
a obține valoarea pentru același
unghi dar exprimat în grade împărțit
la 360 parametrii mișcării circulare
uniforme sunt legate de faptul
că mișcarea este periodică adică
după o rotație completă mișcarea
este repetă identic Deci numim
perioadă te durata unei astfel
de rotații complete după care mișcarea
se repetă identic numim frecvență
a rotației notată cu un you numărul
de rotații complete în unitatea
de timp deci frecvența este inversul
perioadei și în consecință ia are
ca unitate de măsură secunda la
minus 1 Care este notată în sistemul
internațional de referință pentru
unități de măsură cu hărți Deci
o secundă la minus unu se mai numește
și un hertz următorul parametru
este viteza liniară se numește
viteza liniară notată cu viteza
medie a f și se curbilinii din
definiția vitezei medii putem scriu
imediat că viteza liniară este
Delta spre Delta t viteza medie
aduc aminte Era Delta XP Dell tot
a scris în funcție de exciza curbilinie
va fi Delta is împărțit la deal
tate ia poate fi foarte ușor calculată
dacă calculăm acest raport pentru
o rotație completă pentru că atunci
Delta Est suc urbi linie pentru
o rotație completă este circumferința
cercului cel prezentat traiectoria
de ce este 2 pi r iar Delta TVA
fiti Care este durata unei rotații
complete Deci viteza liniară va
fi 2 Pierre împărțit la test sau
doi Petre înmulțit cu frecvența
în you o adori a doua viteză care
se calculează este viteza unghiulară
notată cu Omega acesta este viteza
medie a celelalte și se ceai unghiulară
Deci seminar definiției va fi Omega
Regal sau definit cu Delta l fam
mulți cu Delta t la fel ia poate
fi ușor calculată Considerând o
rotație completă Omega pentru rotație
completă va fi unghiul complet
exprimat în radiani pentru rotație
completă Care este 2 împărțit la
timpul unei rotații complete Care
este perioada de Omega este 2 prin
părțile astea sau 2 pi ori frecvența
nu relația dintre cele două viteze
liniară și cea unghiulară este
imediată din aceste Două ecuații
și anume vei este egal cu un mega
ori vom continua cu calculul accelerației
între o mișcare circulară uniformă
care se numește accelerația centripetă
ia apare datorită modificării direcției
vectorului viteză în fiecare moment
deși magnitudinea sau modulul vectorului
viteza este constant avem un exemplu
foarte interesant de consecință
a modificării direcției numai a
unui Vector că atunci când magnitudinea
lui rămâne constantă în particular
viteza are modul Constanța direcție
variabilă în această tip de mișcare
Considerăm aceeași schemă în care
Un mobil aflat la momentul t0 în
poziția m0d scrie o mișcare circulară
avem vectorul poziție și vectorul
viteză liniară bem Care este perpendicular
pe vectorul poziție reamintesc
faptul că viteza momentană este
perpendiculară pe vectorul poziție
a fost demonstrat în cele doua
lecție de mecanică newtonian mobilul
se mișcă pe această traiectorie
și la momentul t se află între
nouă poziție desenată cu culoarea
roșie în schema noastră e la parcurs
un unghi de alte Alfa are un nou
Vector de poziție care totuși are
același modul numai orientare diferită
și o viteză care are aceeași modul
dar altă orientare să calculăm
unghiul dintre cei doi vectori
viteză Deci avem primul Vector
viteză și cel de al doilea și ne
interesează să calculăm acest unghi
datorită faptului că vectorii poziție
sunt perpendicular pe vectorii
viteză în ambele situații în ambele
momente între 0 și te obținem că
acest unghi dintre cei doi vectori
viteză este Delta Alfa din nou
pentru că axele sau dreptele ce
Delimitează unghiul vitezelor sunt
perpendiculare pe dreptele ce Delimitează
unghiul pozițiilor și deci putem
desena cele două viteze ca având
aceeași porni în același punct
dorim să calculăm Delta vede și
folosind metoda coadă la coadă
la cei doi vectori cei doi vectori
v au aceeași magnitudine dar orienta
diferită separați de acestui care
am demonstrat că e delta Alpha
iar în cazul când Delta te tinde
la 0 vorbim din nou despre aceleași
variații infinitezimale atunci
și Delta Alpha tinde la 0 acestui
tinde la 0 și Deci cei doi vectori
viteză se vor apropia foarte mult
în limita de el tot a tinde la
0 Și atunci vom obține un Vector
viteză perpendicular pe Delta V
Deci în acest caz limită al variațiilor
infinitezimale Delta V devine perpendicular
pe despre variații infinitezimale
am discutat la sfârșitul lecției
precedente în concluzie deoarece
accelerația este proporțională
cu Delta V rezultă că accelerația
centripetă va fie perpendiculară
pe viteză Deci sensul direcția
și sensul accelerației centripete
sunt următoarele direcții este
aceiași cu vectorul poziție dar
sensul este opus Deci acțiunea
accelerația centripetă va fi dealungul
razei și va indica întotdeauna
ca sens centrul traiectoriei pentru
a calcula magnitudinea sau mă duc
la aceste accelerații vedem că
în această limită a variațiilor
infinitezimale ale unghiului în
cazul acesta putem scrie că Delta
avem este aproximativ egală cu
v înmulțit cu Delta l și atunci
calculăm direct accelerația centripetă
împărțind această relație cu Delta
t și obținem așezați la centripete
egală cu b mulți cu Delta Alfa
împărțit la Delta t iarăși interesant
observăm o accelerație generată
nu prin variația vitezei în modul
și variația orientării vitezei
prin variația direcției vitezei
exprimată prin unghiul Alfa imediat
obținem că accelerația centripetă
este V ori Omega viteza liniară
ori viteza unghiulară pentru că
Delta Alpha împărțirea Delta t
e prin definiție viteza unghiulară
Ia mai poate fi scrisă și ca Omega
la pătrat aur R sau Vela pătrat
împărțit la aer să dăm un exemplu
de situație practică în care folosim
o traiectorie circulară uniforma
să calculăm viteza liniară și accelerația
centripetă pe care o aveți dumneavoastră
chiar în acest moment datorită
rotației Pământului în jurul axei
proprii viteza liniară este exprimată
prin relație ca prezentator de
curând iar accelerația centripetă
iarăși poate calcula în funcție
de viteza liniară prin această
relație această schemă descrie
situația cercul este Pământul care
se rotește în jurul axei proprii
Deci are o rotație ni Dumneavoastră
sunteți punctul d r p este raza
pământului o este centrul pământului
iar dumneavoastră Descrieți rotația
desenată cu roșu în cercul roșu
de raza aer Deci pentru a calcula
raza mișcării dumneavoastră circulare
din acest moment aplicăm relația
R este egal cu arcuri sinus de
90 minus latitudinea latitudinea
este unghiul pe care dumneavoastră
la veți în raport cu Axa cu Ecuatorul
pământului nicio Ce este latitudinea
dumneavoastră aminte respectiv
Deci acestui unghi este 90 minus
de grade minus el și sinus de 90
de grade minus El este R împărțit
la r p datorită faptului că acest
unghi este 90 de grade blonde o
rază aproximativă a Pământului
de 640 de km și considerând că
sunteți la ora actuală în București
să spunem Atunci înseamnă că aveți
o latitudine de 44 de grade și
25 de minute pe care o Vom aproximat
cu 45 de grade caz în care putem
să calculăm raza dumneavoastră
de rotație punând valorile pentru
iar pe și el în relația aceasta
Deci la dacă va aflați în București
aveți o rază aproximativă de 4.500
25 de km luni pentru t perioada
de rotație a pământului 24 de ore
adică o zi atât ia aproximativ
pământului să facă o rotație completă
în jurul axei proprii putem calcula
și de parametri viteza liniară
va fi egală după înlocuirea acestora
date cu 329 de metri pe secundă
este foarte interesant este o viteză
foarte mare pentru comparație amintesc
viteza sunetului Care este egală
cu 343 de m pe secundă Deci la
ora actuală elementul actual stând
pe scaun vă rotiți în jurul pământului
cu o viteză liniară aproape de
viteza sunetului Bineînțeles nu
veți simți nimic deoarece tot ce
se află în jurul dumneavoastră
inclusiv aerul se rotește cu aceeași
viteză Deci Important este că stați
pe loc în raport cu toate obiectele
din jurul dumneavoastră inclusiv
aerul Pământul se învârte cu totul
cu toate aceste obiecte incluzând
vă pe dumneavoastră cu această
viteză la punctul la care va frați
accelerația centripetă iarăși foarte
interesant îi iese din calcul foarte
mică este de ordinul al 2c m pe
secundă la pătrat reamintesc că
accelerația gravitațională care
descrie greutatea dumneavoastră
datorită atracției Pământului accelerației
gravitaționale este aproape 10
m pe secundă la pătrat Deci deși
viteza liniară cu care vă rotiți
dumneavoastră și tot ce este înjură
dumneavoastră este foarte mare
aproape de viteza sunetului accelerația
Ce rezultă din această rotație
este foarte mică neglijabilă în
raport cu alte accelerații la care
sunteți sub
Mișcarea circulară uniformăAscunde teorie X




 .
. .
.

 .
.
 .
.

 .
.
 .
.

 .
.

 .
.Navigare în lectii
Cumpara abonament